Laboratory Infrastructure
Mechatronics and Robotics Laboratory
Control Engineering Laboratory
Servodrives Laboratory
Mechatronics and Robotics Laboratory
Person in charge: Prof. Alexander Beshta
Topics:
- Sensors, Electropneumatics, Electrohydroautomatics, Electromechatronics
- Robotics and robotic production complexes
Equipment:
- MPS Handling portal robot station
- MPS Joining
- MPS Sorting
- MPS Handling
Control Engineering Laboratory
Person in charge: Associate Prof. A. Balakhontsev
Topics:
- Variable frequency drives
- Programmable logic controllers (PLCs)
- DC-motor based electric drives
- Model-based design of controllers for electric drives
Equipment:
- Remote access: membrane-pump with variable frequency drive, PID-controller for air pressur
- Variable frequency drives for two hydraulic pumps operating on common water reservoir
- PLC-controlled assembly robots
- PLC-controlled elevator system
Servodrives Laboratory
Person in charge: Prof. Serhii Khudoli
Topics:
- Fundamentals of servo drives
DC servo motors/ AC servo motors / Stepper motors - Mechanical components of servo drives
Linear and rotational transmissions / Reduction of masses and calculation of inertia - Position sensors
Incremental and absolute sensors /Rotational and linear sensors /Transmission protocols - Control systems
Structure of control systems / Dynamics and control quality / Programming servodrives’ control systems.
Equipment:
- Standalone Micro Servo 9g SG90 with Arduino
- ParallelMicro Servo 9g SG90 with Arduino
- Standalone MG996R with Arduino
- Parallel MG996R with Arduino
- STEP MOTOR 28BYJ-48 with Arduino
- Servo drives with stepper motors
- Delta servo drives




Robotics and Telematics Laboratory
Control Enginnering Laboratory
Robotics and Telematics Laboratory
Person in charge: Prof. Dr-.Ing. Arnd Buschhaus
Topics:
- Development of robotics applications, robotics tools and peripheral devices
- Development of robot control software
- Project planning and set-up for systems and components for factory automation
- Development of teleoperation methods and software for remote internet access to equipment and systems
- Development of e-learning methods and software for use with real-life equipment and systems (remote, internet-based experiments)
Equipment:
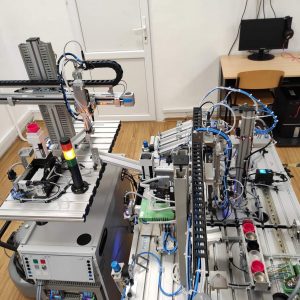
- 12 robot cells with different jointed arm robots, cartesian robots, SCARA systems and delta kinematics of multiple robot manufacturers like Stäubli, KUKA, UR, Manz, Yaskawa, Mitsubishi and more.
- A complex production line consisting of a Stäubli jointed arm robot and a Epson SCARA robot combined with material handling systems, feeding systems and a RFID setup, whereby the overall system is controlled by a PLC network.
- Multiple online demonstration experiments for accessing real-life automation equipment via the internet. For more information, please visit https://vvl.reutlingen-university.de/homepage/en/index.html.
- Three remote lab experiments that can be carried out via the internet with access to real-life systems in the laboratory. More experiments are developed in course of this project.
Control Enginnering Laboratory
Person in charge: Prof. Dr.-Ing. Antonio Notholt
Topics:
- Model-based controller development (rapid control prototyping)
- Adaptive control engineering
- Energy management in technical systems
- Decentralised energy systems (smart grids)
- Force and motion simulation and haptic systems
Equipment:
- dSPACE ds1104 and ds1103 rapid control prototyping development systems; systems: Matlab/Simulink
- Force field simulation demonstrations
- Motion simulator
- Central heating simulator
- Simulator for neural networks and fuzzy control
- Deep UV excimer laser system